Manual Car Driving Mechanism
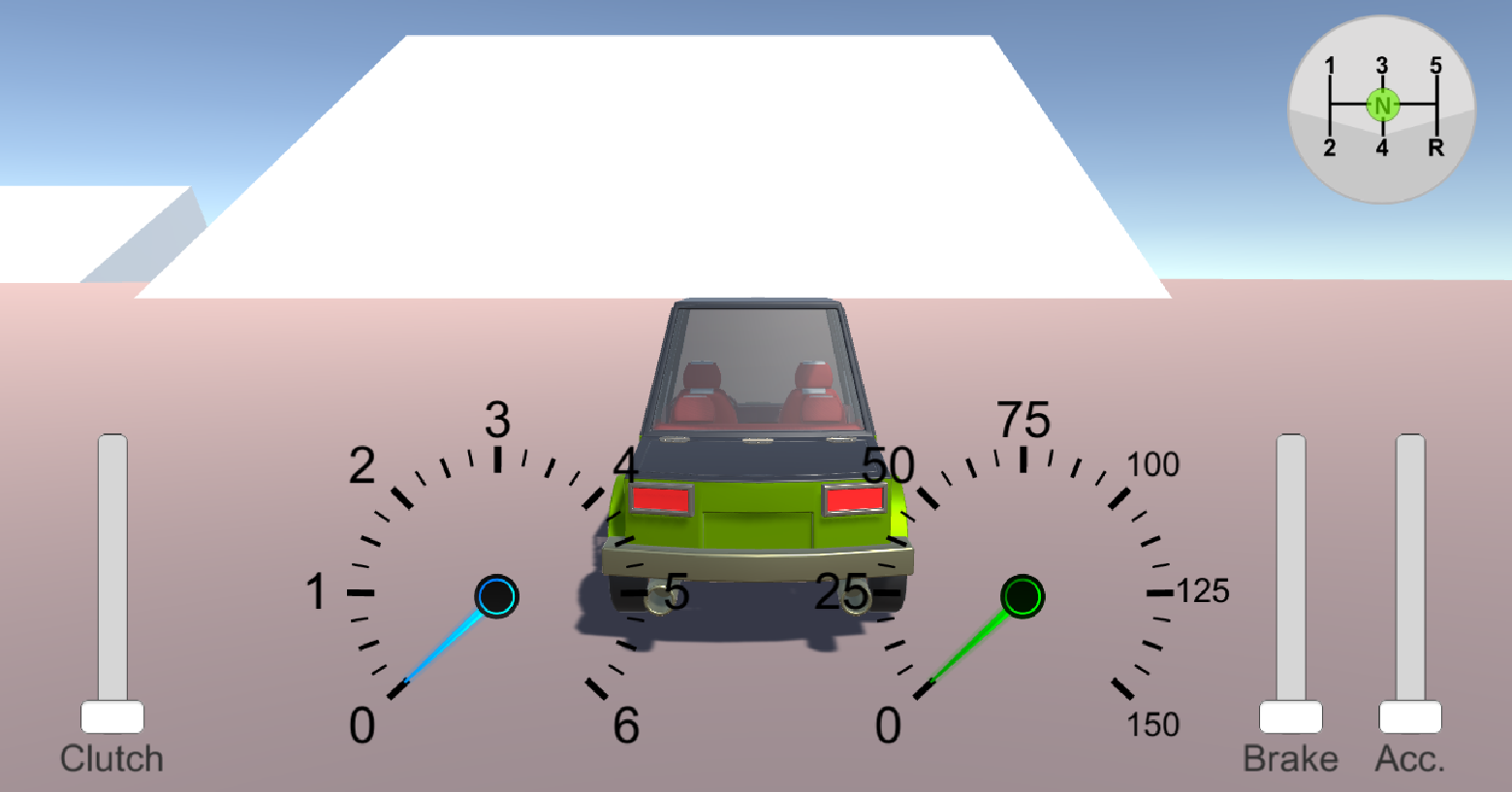
This game is a simulation of real world driving, where you need precise control over Clutch, Accelerator and Brake to drive without any halt and increase car’s economy. Majority of the time on this project is spent in building the mechanics of the entire gearbox/clutch system. The project was done as a part of challenge at Unity Connect.
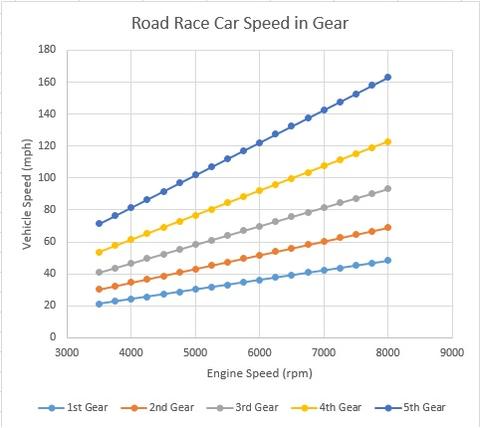
- References for valid gear shift
- Working Video